



型号:TONREN-KT-90301
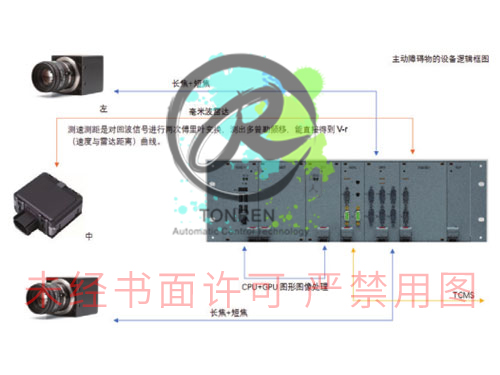
明确了管控逻辑方向,我们的主动障碍物系统方案如下图。


为完成未来超长距离的测算,本次主动识别率先完成部分功能的归拢,然后采用神经元科学技术和雷达传感,雷达点云归列数据分析,封包SDK交付上位机,本雷达采用毫米波雷达,点云,夹角波等回馈值进行测算。采用毫米波雷达点云集合形式可以精准测距,至于毫米波雷达本身因为夹角成像和点云重叠导致被摄物体不清晰得问题,我们采用两款长短焦摄像机或者广角摄像机来进行数据图像得匹配和还原,采用CPU算图,算数。识别障碍物单体的图像运算均来大将平台的超强算力,然后辅助以毫米波雷达的精准标定,就会知道障碍物的所在距离。摄像机可从2个以上角度进行独立运算和独立控制,多个视角原则上不做认知融合,认知融合在故障物发生后软件后台做显示上位的图像切换。
列车非接触式障碍物检测装置,利用高可靠、高安全的软硬件平台配合传感器,实现安全、可靠的障碍物检测。在远、中、近距离上对营运车辆形成多重立体的安全保护。本系统是全自动驾驶列车的新一代安全防护装备。
本系统主动检测采用远焦摄像机加近焦摄像机的视频传感器组合,在大范围实现了图像采集的有效覆盖,辅以雷达的高清点云数据,通过数据融合,依托深度神经网络算法,实现对轨行区各类障碍物的精准检测和主动提前预警。系统经训练后,漏报率不高于0.1%,误报率不高于0.1%,可检测行进前方轨道上可视范围内550米距离处的侵界障碍物(例如人、行李箱等投影面积不小于0.5㎡,高度不低于0.5m),提供碰撞风险预警和自动触发,避免与轨道上的障碍物碰撞事故。

软件功能:
1、轨间间距监测。
2、近轨外沿2米范围内运动物体判断监测。
3、入轨障碍预计。
4、环境净化处理,包含光感、雨天、雾霾、雷电、粉尘、沙石。
5、垂直锥杯 550 米测距。(可定制更长距离)
6、LIUNX 系统触发联动(在A车节设备故障情况下,B车设备响应并承接功能)。
硬件功能:
3U 主动障碍物主机
1、全3U欧卡机箱,标准100* 1 60板卡。
2、 系统板卡采用intel 17 6822EQ, 内存 BG , SYSTEM DATA 128G MLC。
3、数据存储卡采用HDD硬盘,4T。
4、图像采集卡采用1050TI。
5、车辆DIO控制卡,采用全DIO控制模型。
6、交换机卡采用6路千兆以太网( 长短焦4路SW TICH判断,毫米波测距一路SWTICH判断并协议转换)。
7、电源卡采用DC66V~ DC160V 宽压输入。
8、背板采用PXIE混合通讯背板。
9、长短焦卡,采用解串系列芯片处理传感器来源数据。
10、雷达控制卡 ,采用CAN总线运放滤波处理传感器来源数据。
11、机箱2P 40
传感器箱
1、毫米波雷达一枚。
2、长焦相机二枚。
3、短焦相机二枚。
4、无需外供电。
5、整箱IP66 。
系统便携监测仪")



